热点新闻
仿生机械手
欠驱动假肢手的虚拟主从控制
发布时间:2015-09-22 作者: 来源: 浏览次数:
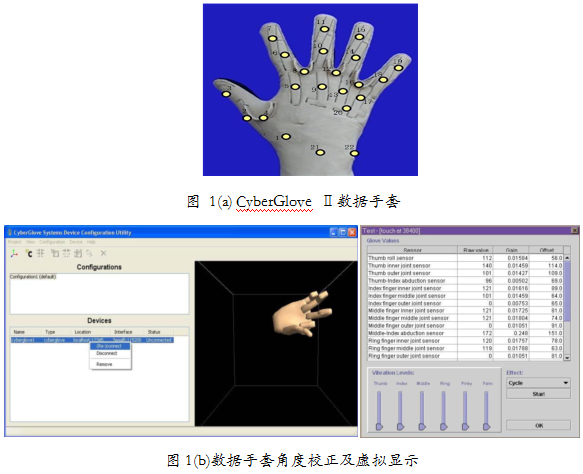
实验概况:本次实验基于数据手套搭建了人手与假肢手主从控制系统的硬件控制平台,构建了基于数据手套的人手与假肢手主从控制系统方案,通过借助人的高度智能、丰富的经验、强大的学习及处理实际问题的能力,将假肢很难完成的高层任务决策权交给人来完成,通过假肢手去进行实时抓取操作,实现人的智能与假肢手机械性能的有机结合。
实验目标:巩固和加强C++和LabVIEW软件的学习和控制原理方法的理论知识,了解数据手套的使用方法,增强学生对机械电子控制的兴趣与热情。
实验功能:通过虚拟仿真平台,可以支持学生通过编程,实现基于数据手套的主从控制研究,模拟假肢手在人手的高层决策下运动。
教学效果:巩固和加强学生对C++和LabVIEW软件的学习和控制原理方法的理论知识的理解和掌握,了解数据手套的使用方法。