
热点新闻
智能制造
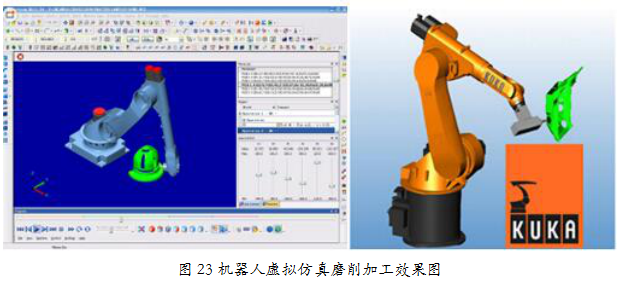
机器人虚拟仿真磨削加工
发布时间:2015-08-18 作者: 来源: 浏览次数:
实验概况:随着机器人研究的不断深入和机器人领域的不断发展,机器人仿真系统作为机器人设计和研究过程中安全可靠、灵活方便的工具, 发挥着越来越重要的作用。工业机器人的研制是一个复杂的过程,在机器人的制造之前,应进行计算机仿真。通过仿真,可以估价机器人系统某一部分的性能;可以估价系统各个部分之间的相互影响,以及它们对整体性能的影响;可以比较各种设计方案,从中获得最佳设计;在机器人系统研制中间用于设计和精密分析,可以对一些新建的理论、假设进行检验;通过计算机仿真,可以使机器人设计和研究过程安全可靠、灵活方便,可以使研究人员避免了机器人运动分析中的大量计算和出错的可能。基于RobotArt软件,通过对于机器人进行三维实体建模,在软件中建立工业机器人及其工作环境的三维模型;通过零件模型几何特征或自绘空间曲线创建工业机器人运动轨迹,实现工业机器人实际运动仿真。可以实现不同品牌工业机器人如ABB、KUKA、FANUC、STAUBLI、广州数控、新松等的磨削仿真,直观安全用于帮助学生了解和掌握机器人加工环境,促进理论与实践结合。
实验目标:从工业机器人库中,选取相应品牌类型机器人,通过RobotArt软件,对机器人进行磨削仿真。并且通过磨削仿真认识到机器人磨削加工的工作过程。
实验功能:仿真演示选型机器人,坐标系设定,机器人运动模拟仿真,认识和理解机器人磨削加工的原理。
教学效果:认识机器人虚拟仿真磨削加工原理,以及工作设备要求,了解磨削加工控制流程。
上一篇:机器人虚拟仿真焊接